In this notebook I am going to re-implement YOLOV2 as described in the paper
YOLO9000: Better, Faster, Stronger . The goal is to replicate the model as described in the paper and train it on the
VOC 2012 dataset.
Introduction Most of the code, in this notbook comes from a series of blog posts by Yumi. I just followed his posts to get things working. The original blog post uses Tensorflow 1.x so I had to change a few things to make it work but most of the code remains the same. I am linking all his blog posts here, and I highly recommend taking a look at it as it explains everything in much more detail.
Yumi’s Blog Posts with explanation Google colab with end to end training and evaluation on VOC 2012 I followed Yumi’s blogs to replicate YOLOV2 for VOC 2012 dataset. If you are looking for a consolidated python notebook with everything working, you can clone this Google Colab notebook.
https://colab.research.google.com/drive/14mPj3NYg_lJwWCRclzgPzdpKXoQutxUb?usp=sharing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
import tensorflow as tf
import matplotlib.pyplot as plt # for plotting the images
%matplotlib inline
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
from google.colab import drive
drive.mount('/content/gdrive')
Drive already mounted at /content/gdrive; to attempt to forcibly remount, call drive.mount("/content/gdrive" , force_remount=True).
Data Preprocessing I would be using
VOC 2012 dataset as its size is manageable so it would be easy to run it using Google Colab.
First, I download and extract the dataset.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
!wget http://host.robots.ox.ac.uk/pascal/VOC/voc2012/VOCtrainval_11-May-2012.tar
--2020-07-06 20 :57:53-- http://host.robots.ox.ac.uk/pascal/VOC/voc2012/VOCtrainval_11-May-2012.tar
Resolving host.robots.ox.ac.uk (host.robots.ox.ac.uk)... 129.67 .94 .152
Connecting to host.robots.ox.ac.uk (host.robots.ox.ac.uk)|129.67.94.152|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 1999639040 (1.9G) [application/x-tar]
Saving to: ‘VOCtrainval_11-May-2012.tar.1’
VOCtrainval_11-May- 100 %[===================>] 1. 86G 9. 38MB/s in 3m 35s
2020 -07 -06 21 :01:28 (8.88 MB/s) - ‘VOCtrainval_11-May-2012.tar.1’ saved [1999639040/1999639040]
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
!tar xvf VOCtrainval_11-May-2012.tar
Next, we define a function that parses the annotations from the XML files and stores it in an array.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
import os
import xml.etree.ElementTree as ET
def parse_annotation(ann_dir, img_dir, labels=[]):
all_imgs = []
seen_labels = {}
for ann in sorted(os.listdir(ann_dir)):
if "xml" not in ann:
continue
img = {'object':[]}
tree = ET.parse(ann_dir + ann)
for elem in tree.iter():
if 'filename' in elem.tag:
path_to_image = img_dir + elem.text
img['filename'] = path_to_image
## make sure that the image exists:
if not os.path.exists(path_to_image):
assert False, "file does not exist!\n{}".format(path_to_image)
if 'width' in elem.tag:
img['width'] = int(elem.text)
if 'height' in elem.tag:
img['height'] = int(elem.text)
if 'object' in elem.tag or 'part' in elem.tag:
obj = {}
for attr in list(elem):
if 'name' in attr.tag:
obj['name'] = attr.text
if len(labels) > 0 and obj['name'] not in labels:
break
else:
img['object'] += [obj]
if obj['name'] in seen_labels:
seen_labels[obj['name']] += 1
else:
seen_labels[obj['name']] = 1
if 'bndbox' in attr.tag:
for dim in list(attr):
if 'xmin' in dim.tag:
obj['xmin'] = int(round(float(dim.text)))
if 'ymin' in dim.tag:
obj['ymin'] = int(round(float(dim.text)))
if 'xmax' in dim.tag:
obj['xmax'] = int(round(float(dim.text)))
if 'ymax' in dim.tag:
obj['ymax'] = int(round(float(dim.text)))
if len(img['object']) > 0:
all_imgs += [img]
return all_imgs, seen_labels
We prepare the arrays with training_image and seen_train_labels for the whole dataset.
As opposed to YOLOV1, YOLOV2 uses K-means clustering to find the best anchor box sizes for the given dataset.
The ANCHORS defined below are taken from the following blog:
Part 1 Object Detection using YOLOv2 on Pascal VOC2012 - anchor box clustering .
Instead of rerunning the K-means algorithm again, we use the ANCHORS obtained by
Yumi as it is.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
import numpy as np
## Parse annotations
train_image_folder = "VOCdevkit/VOC2012/JPEGImages/"
train_annot_folder = "VOCdevkit/VOC2012/Annotations/"
ANCHORS = np.array([1.07709888, 1.78171903, # anchor box 1, width , height
2.71054693, 5.12469308, # anchor box 2, width, height
10.47181473, 10.09646365, # anchor box 3, width, height
5.48531347, 8.11011331]) # anchor box 4, width, height
LABELS = ['aeroplane', 'bicycle', 'bird', 'boat', 'bottle',
'bus', 'car', 'cat', 'chair', 'cow',
'diningtable','dog', 'horse', 'motorbike', 'person',
'pottedplant','sheep', 'sofa', 'train', 'tvmonitor']
train_image, seen_train_labels = parse_annotation(train_annot_folder,train_image_folder, labels=LABELS)
print("N train = {}".format(len(train_image)))
N train = 17125
Next, we define a ImageReader class to process an image. It takes in an image and returns the resized image and all the objects in the image.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
import copy
import cv2
class ImageReader(object):
def __init__(self,IMAGE_H,IMAGE_W, norm=None):
self.IMAGE_H = IMAGE_H
self.IMAGE_W = IMAGE_W
self.norm = norm
def encode_core(self,image, reorder_rgb=True):
image = cv2.resize(image, (self.IMAGE_H, self.IMAGE_W))
if reorder_rgb:
image = image[:,:,::-1]
if self.norm is not None:
image = self.norm(image)
return(image)
def fit(self,train_instance):
'''
read in and resize the image, annotations are resized accordingly.
-- Input --
train_instance : dictionary containing filename, height, width and object
{'filename': 'ObjectDetectionRCNN/VOCdevkit/VOC2012/JPEGImages/2008_000054.jpg',
'height': 333,
'width': 500,
'object': [{'name': 'bird',
'xmax': 318,
'xmin': 284,
'ymax': 184,
'ymin': 100},
{'name': 'bird',
'xmax': 198,
'xmin': 112,
'ymax': 209,
'ymin': 146}]
}
'''
if not isinstance(train_instance,dict):
train_instance = {'filename':train_instance}
image_name = train_instance['filename']
image = cv2.imread(image_name)
h, w, c = image.shape
if image is None: print('Cannot find ', image_name)
image = self.encode_core(image, reorder_rgb=True)
if "object" in train_instance.keys():
all_objs = copy.deepcopy(train_instance['object'])
# fix object's position and size
for obj in all_objs:
for attr in ['xmin', 'xmax']:
obj[attr] = int(obj[attr] * float(self.IMAGE_W) / w)
obj[attr] = max(min(obj[attr], self.IMAGE_W), 0)
for attr in ['ymin', 'ymax']:
obj[attr] = int(obj[attr] * float(self.IMAGE_H) / h)
obj[attr] = max(min(obj[attr], self.IMAGE_H), 0)
else:
return image
return image, all_objs
Here’s a sample usage of the ImageReader class.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
def normalize(image):
return image / 255.
print("*"*30)
print("Input")
timage = train_image[0]
for key, v in timage.items():
print(" {}: {}".format(key,v))
print("*"*30)
print("Output")
inputEncoder = ImageReader(IMAGE_H=416,IMAGE_W=416, norm=normalize)
image, all_objs = inputEncoder.fit(timage)
print(" {}".format(all_objs))
plt.imshow(image)
plt.title("image.shape={}".format(image.shape))
plt.show()
******************************
Input
object: [{'name': 'person' , 'xmin': 174 , 'ymin': 101 , 'xmax': 349 , 'ymax': 351 }]
filename: VOCdevkit/VOC2012/JPEGImages/2007_000027.jpg
width: 486
height: 500
******************************
Output
[{'name': 'person' , 'xmin': 148 , 'ymin': 84 , 'xmax': 298 , 'ymax': 292 }]
Next, we define BestAnchorBoxFinder which finds the best anchor box for a particular object. This is done by finding the anchor box with the highest IOU(Intersection over Union) with the bounding box of the object.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
class BestAnchorBoxFinder(object):
def __init__(self, ANCHORS):
'''
ANCHORS: a np.array of even number length e.g.
_ANCHORS = [4,2, ## width=4, height=2, flat large anchor box
2,4, ## width=2, height=4, tall large anchor box
1,1] ## width=1, height=1, small anchor box
'''
self.anchors = [BoundBox(0, 0, ANCHORS[2*i], ANCHORS[2*i+1])
for i in range(int(len(ANCHORS)//2))]
def _interval_overlap(self,interval_a, interval_b):
x1, x2 = interval_a
x3, x4 = interval_b
if x3 < x1:
if x4 < x1:
return 0
else:
return min(x2,x4) - x1
else:
if x2 < x3:
return 0
else:
return min(x2,x4) - x3
def bbox_iou(self,box1, box2):
intersect_w = self._interval_overlap([box1.xmin, box1.xmax], [box2.xmin, box2.xmax])
intersect_h = self._interval_overlap([box1.ymin, box1.ymax], [box2.ymin, box2.ymax])
intersect = intersect_w * intersect_h
w1, h1 = box1.xmax-box1.xmin, box1.ymax-box1.ymin
w2, h2 = box2.xmax-box2.xmin, box2.ymax-box2.ymin
union = w1*h1 + w2*h2 - intersect
return float(intersect) / union
def find(self,center_w, center_h):
# find the anchor that best predicts this box
best_anchor = -1
max_iou = -1
# each Anchor box is specialized to have a certain shape.
# e.g., flat large rectangle, or small square
shifted_box = BoundBox(0, 0,center_w, center_h)
## For given object, find the best anchor box!
for i in range(len(self.anchors)): ## run through each anchor box
anchor = self.anchors[i]
iou = self.bbox_iou(shifted_box, anchor)
if max_iou < iou:
best_anchor = i
max_iou = iou
return(best_anchor,max_iou)
class BoundBox:
def __init__(self, xmin, ymin, xmax, ymax, confidence=None,classes=None):
self.xmin, self.ymin = xmin, ymin
self.xmax, self.ymax = xmax, ymax
## the code below are used during inference
# probability
self.confidence = confidence
# class probaiblities [c1, c2, .. cNclass]
self.set_class(classes)
def set_class(self,classes):
self.classes = classes
self.label = np.argmax(self.classes)
def get_label(self):
return(self.label)
def get_score(self):
return(self.classes[self.label])
Here’s a sample usage of the BestAnchorBoxFinder class.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
# Anchor box width and height found in https://fairyonice.github.io/Part_1_Object_Detection_with_Yolo_for_VOC_2014_data_anchor_box_clustering.html
_ANCHORS01 = np.array([0.08285376, 0.13705531,
0.20850361, 0.39420716,
0.80552421, 0.77665105,
0.42194719, 0.62385487])
print(".."*40)
print("The three example anchor boxes:")
count = 0
for i in range(0,len(_ANCHORS01),2):
print("anchor box index={}, w={}, h={}".format(count,_ANCHORS01[i],_ANCHORS01[i+1]))
count += 1
print(".."*40)
print("Allocate bounding box of various width and height into the three anchor boxes:")
babf = BestAnchorBoxFinder(_ANCHORS01)
for w in range(1,9,2):
w /= 10.
for h in range(1,9,2):
h /= 10.
best_anchor,max_iou = babf.find(w,h)
print("bounding box (w = {}, h = {}) --> best anchor box index = {}, iou = {:03.2f}".format(
w,h,best_anchor,max_iou))
................................................................................
The three example anchor boxes:
anchor box index=0, w=0.08285376, h=0.13705531
anchor box index=1, w=0.20850361, h=0.39420716
anchor box index=2, w=0.80552421, h=0.77665105
anchor box index=3, w=0.42194719, h=0.62385487
................................................................................
Allocate bounding box of various width and height into the three anchor boxes:
bounding box (w = 0.1 , h = 0.1 ) --> best anchor box index = 0 , iou = 0.63
bounding box (w = 0.1 , h = 0.3 ) --> best anchor box index = 0 , iou = 0.38
bounding box (w = 0.1 , h = 0.5 ) --> best anchor box index = 1 , iou = 0.42
bounding box (w = 0.1 , h = 0.7 ) --> best anchor box index = 1 , iou = 0.35
bounding box (w = 0.3 , h = 0.1 ) --> best anchor box index = 0 , iou = 0.25
bounding box (w = 0.3 , h = 0.3 ) --> best anchor box index = 1 , iou = 0.57
bounding box (w = 0.3 , h = 0.5 ) --> best anchor box index = 3 , iou = 0.57
bounding box (w = 0.3 , h = 0.7 ) --> best anchor box index = 3 , iou = 0.65
bounding box (w = 0.5 , h = 0.1 ) --> best anchor box index = 1 , iou = 0.19
bounding box (w = 0.5 , h = 0.3 ) --> best anchor box index = 3 , iou = 0.44
bounding box (w = 0.5 , h = 0.5 ) --> best anchor box index = 3 , iou = 0.70
bounding box (w = 0.5 , h = 0.7 ) --> best anchor box index = 3 , iou = 0.75
bounding box (w = 0.7 , h = 0.1 ) --> best anchor box index = 1 , iou = 0.16
bounding box (w = 0.7 , h = 0.3 ) --> best anchor box index = 3 , iou = 0.37
bounding box (w = 0.7 , h = 0.5 ) --> best anchor box index = 2 , iou = 0.56
bounding box (w = 0.7 , h = 0.7 ) --> best anchor box index = 2 , iou = 0.78
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
def rescale_centerxy(obj,config):
'''
obj: dictionary containing xmin, xmax, ymin, ymax
config : dictionary containing IMAGE_W, GRID_W, IMAGE_H and GRID_H
'''
center_x = .5*(obj['xmin'] + obj['xmax'])
center_x = center_x / (float(config['IMAGE_W']) / config['GRID_W'])
center_y = .5*(obj['ymin'] + obj['ymax'])
center_y = center_y / (float(config['IMAGE_H']) / config['GRID_H'])
return(center_x,center_y)
def rescale_cebterwh(obj,config):
'''
obj: dictionary containing xmin, xmax, ymin, ymax
config : dictionary containing IMAGE_W, GRID_W, IMAGE_H and GRID_H
'''
# unit: grid cell
center_w = (obj['xmax'] - obj['xmin']) / (float(config['IMAGE_W']) / config['GRID_W'])
# unit: grid cell
center_h = (obj['ymax'] - obj['ymin']) / (float(config['IMAGE_H']) / config['GRID_H'])
return(center_w,center_h)
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
obj = {'xmin': 150, 'ymin': 84, 'xmax': 300, 'ymax': 294}
config = {"IMAGE_W":416,"IMAGE_H":416,"GRID_W":13,"GRID_H":13}
center_x, center_y = rescale_centerxy(obj,config)
center_w, center_h = rescale_cebterwh(obj,config)
print("cebter_x abd cebter_w should range between 0 and {}".format(config["GRID_W"]))
print("cebter_y abd cebter_h should range between 0 and {}".format(config["GRID_H"]))
print("center_x = {:06.3f} range between 0 and {}".format(center_x, config["GRID_W"]))
print("center_y = {:06.3f} range between 0 and {}".format(center_y, config["GRID_H"]))
print("center_w = {:06.3f} range between 0 and {}".format(center_w, config["GRID_W"]))
print("center_h = {:06.3f} range between 0 and {}".format(center_h, config["GRID_H"]))
cebter_x abd cebter_w should range between 0 and 13
cebter_y abd cebter_h should range between 0 and 13
center_x = 07.031 range between 0 and 13
center_y = 05.906 range between 0 and 13
center_w = 04.688 range between 0 and 13
center_h = 06.562 range between 0 and 13
Next, we define a custom Batch generator to get a batch of 16 images and its corresponding bounding boxes.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
from tensorflow.keras.utils import Sequence
class SimpleBatchGenerator(Sequence):
def __init__(self, images, config, norm=None, shuffle=True):
'''
config : dictionary containing necessary hyper parameters for traning. e.g.,
{
'IMAGE_H' : 416,
'IMAGE_W' : 416,
'GRID_H' : 13,
'GRID_W' : 13,
'LABELS' : ['aeroplane', 'bicycle', 'bird', 'boat', 'bottle',
'bus', 'car', 'cat', 'chair', 'cow',
'diningtable','dog', 'horse', 'motorbike', 'person',
'pottedplant','sheep', 'sofa', 'train', 'tvmonitor'],
'ANCHORS' : array([ 1.07709888, 1.78171903,
2.71054693, 5.12469308,
10.47181473, 10.09646365,
5.48531347, 8.11011331]),
'BATCH_SIZE' : 16,
'TRUE_BOX_BUFFER' : 50,
}
'''
self.config = config
self.config["BOX"] = int(len(self.config['ANCHORS'])/2)
self.config["CLASS"] = len(self.config['LABELS'])
self.images = images
self.bestAnchorBoxFinder = BestAnchorBoxFinder(config['ANCHORS'])
self.imageReader = ImageReader(config['IMAGE_H'],config['IMAGE_W'],norm=norm)
self.shuffle = shuffle
if self.shuffle:
np.random.shuffle(self.images)
def __len__(self):
return int(np.ceil(float(len(self.images))/self.config['BATCH_SIZE']))
def __getitem__(self, idx):
'''
== input ==
idx : non-negative integer value e.g., 0
== output ==
x_batch: The numpy array of shape (BATCH_SIZE, IMAGE_H, IMAGE_W, N channels).
x_batch[iframe,:,:,:] contains a iframeth frame of size (IMAGE_H,IMAGE_W).
y_batch:
The numpy array of shape (BATCH_SIZE, GRID_H, GRID_W, BOX, 4 + 1 + N classes).
BOX = The number of anchor boxes.
y_batch[iframe,igrid_h,igrid_w,ianchor,:4] contains (center_x,center_y,center_w,center_h)
of ianchorth anchor at grid cell=(igrid_h,igrid_w) if the object exists in
this (grid cell, anchor) pair, else they simply contain 0.
y_batch[iframe,igrid_h,igrid_w,ianchor,4] contains 1 if the object exists in this
(grid cell, anchor) pair, else it contains 0.
y_batch[iframe,igrid_h,igrid_w,ianchor,5 + iclass] contains 1 if the iclass^th
class object exists in this (grid cell, anchor) pair, else it contains 0.
b_batch:
The numpy array of shape (BATCH_SIZE, 1, 1, 1, TRUE_BOX_BUFFER, 4).
b_batch[iframe,1,1,1,ibuffer,ianchor,:] contains ibufferth object's
(center_x,center_y,center_w,center_h) in iframeth frame.
If ibuffer > N objects in iframeth frame, then the values are simply 0.
TRUE_BOX_BUFFER has to be some large number, so that the frame with the
biggest number of objects can also record all objects.
The order of the objects do not matter.
This is just a hack to easily calculate loss.
'''
l_bound = idx*self.config['BATCH_SIZE']
r_bound = (idx+1)*self.config['BATCH_SIZE']
if r_bound > len(self.images):
r_bound = len(self.images)
l_bound = r_bound - self.config['BATCH_SIZE']
instance_count = 0
## prepare empty storage space: this will be output
x_batch = np.zeros((r_bound - l_bound, self.config['IMAGE_H'], self.config['IMAGE_W'], 3)) # input images
b_batch = np.zeros((r_bound - l_bound, 1 , 1 , 1 , self.config['TRUE_BOX_BUFFER'], 4)) # list of self.config['TRUE_self.config['BOX']_BUFFER'] GT boxes
y_batch = np.zeros((r_bound - l_bound, self.config['GRID_H'], self.config['GRID_W'], self.config['BOX'], 4+1+len(self.config['LABELS']))) # desired network output
for train_instance in self.images[l_bound:r_bound]:
# augment input image and fix object's position and size
img, all_objs = self.imageReader.fit(train_instance)
# construct output from object's x, y, w, h
true_box_index = 0
for obj in all_objs:
if obj['xmax'] > obj['xmin'] and obj['ymax'] > obj['ymin'] and obj['name'] in self.config['LABELS']:
center_x, center_y = rescale_centerxy(obj,self.config)
grid_x = int(np.floor(center_x))
grid_y = int(np.floor(center_y))
if grid_x < self.config['GRID_W'] and grid_y < self.config['GRID_H']:
obj_indx = self.config['LABELS'].index(obj['name'])
center_w, center_h = rescale_cebterwh(obj,self.config)
box = [center_x, center_y, center_w, center_h]
best_anchor,max_iou = self.bestAnchorBoxFinder.find(center_w, center_h)
# assign ground truth x, y, w, h, confidence and class probs to y_batch
# it could happen that the same grid cell contain 2 similar shape objects
# as a result the same anchor box is selected as the best anchor box by the multiple objects
# in such ase, the object is over written
y_batch[instance_count, grid_y, grid_x, best_anchor, 0:4] = box # center_x, center_y, w, h
y_batch[instance_count, grid_y, grid_x, best_anchor, 4 ] = 1. # ground truth confidence is 1
y_batch[instance_count, grid_y, grid_x, best_anchor, 5+obj_indx] = 1 # class probability of the object
# assign the true box to b_batch
b_batch[instance_count, 0, 0, 0, true_box_index] = box
true_box_index += 1
true_box_index = true_box_index % self.config['TRUE_BOX_BUFFER']
x_batch[instance_count] = img
# increase instance counter in current batch
instance_count += 1
return [x_batch, b_batch], y_batch
def on_epoch_end(self):
if self.shuffle:
np.random.shuffle(self.images)
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
GRID_H, GRID_W = 13 , 13
ANCHORS = _ANCHORS01
ANCHORS[::2] = ANCHORS[::2]*GRID_W
ANCHORS[1::2] = ANCHORS[1::2]*GRID_H
ANCHORS
array([ 1.07709888 , 1.78171903 , 2.71054693 , 5.12469308 , 10.47181473 ,
10.09646365 , 5.48531347 , 8.11011331 ])
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
IMAGE_H, IMAGE_W = 416, 416
BATCH_SIZE = 16
TRUE_BOX_BUFFER = 50
BOX = int(len(ANCHORS)/2)
CLASS = len(LABELS)
generator_config = {
'IMAGE_H' : IMAGE_H,
'IMAGE_W' : IMAGE_W,
'GRID_H' : GRID_H,
'GRID_W' : GRID_W,
'BOX' : BOX,
'LABELS' : LABELS,
'ANCHORS' : ANCHORS,
'BATCH_SIZE' : BATCH_SIZE,
'TRUE_BOX_BUFFER' : TRUE_BOX_BUFFER,
}
train_batch_generator = SimpleBatchGenerator(train_image, generator_config,
norm=normalize, shuffle=True)
[x_batch,b_batch],y_batch = train_batch_generator.__getitem__(idx=3)
print("x_batch: (BATCH_SIZE, IMAGE_H, IMAGE_W, N channels) = {}".format(x_batch.shape))
print("y_batch: (BATCH_SIZE, GRID_H, GRID_W, BOX, 4 + 1 + N classes) = {}".format(y_batch.shape))
print("b_batch: (BATCH_SIZE, 1, 1, 1, TRUE_BOX_BUFFER, 4) = {}".format(b_batch.shape))
x_batch: (BATCH_SIZE, IMAGE_H, IMAGE_W, N channels) = (16, 416 , 416 , 3 )
y_batch: (BATCH_SIZE, GRID_H, GRID_W, BOX, 4 + 1 + N classes) = (16, 13 , 13 , 4 , 25 )
b_batch: (BATCH_SIZE, 1 , 1 , 1 , TRUE_BOX_BUFFER, 4 ) = (16, 1 , 1 , 1 , 50 , 4 )
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
iframe= 1
def check_object_in_grid_anchor_pair(irow):
for igrid_h in range(generator_config["GRID_H"]):
for igrid_w in range(generator_config["GRID_W"]):
for ianchor in range(generator_config["BOX"]):
vec = y_batch[irow,igrid_h,igrid_w,ianchor,:]
C = vec[4] ## ground truth confidence
if C == 1:
class_nm = np.array(LABELS)[np.where(vec[5:])]
assert len(class_nm) == 1
print("igrid_h={:02.0f},igrid_w={:02.0f},iAnchor={:02.0f}, {}".format(
igrid_h,igrid_w,ianchor,class_nm[0]))
check_object_in_grid_anchor_pair(iframe)
igrid_h =11 ,igrid_w=06 ,iAnchor=00 , person
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
def plot_image_with_grid_cell_partition(irow):
img = x_batch[irow]
plt.figure(figsize=(15,15))
plt.imshow(img)
for wh in ["W","H"]:
GRID_ = generator_config["GRID_" + wh] ## 13
IMAGE_ = generator_config["IMAGE_" + wh] ## 416
if wh == "W":
pltax = plt.axvline
plttick = plt.xticks
else:
pltax = plt.axhline
plttick = plt.yticks
for count in range(GRID_):
l = IMAGE_*count/GRID_
pltax(l,color="yellow",alpha=0.3)
plttick([(i + 0.5)*IMAGE_/GRID_ for i in range(GRID_)],
["iGRID{}={}".format(wh,i) for i in range(GRID_)])
def plot_grid(irow):
import seaborn as sns
color_palette = list(sns.xkcd_rgb.values())
iobj = 0
for igrid_h in range(generator_config["GRID_H"]):
for igrid_w in range(generator_config["GRID_W"]):
for ianchor in range(generator_config["BOX"]):
vec = y_batch[irow,igrid_h,igrid_w,ianchor,:]
C = vec[4] ## ground truth confidence
if C == 1:
class_nm = np.array(LABELS)[np.where(vec[5:])]
x, y, w, h = vec[:4]
multx = generator_config["IMAGE_W"]/generator_config["GRID_W"]
multy = generator_config["IMAGE_H"]/generator_config["GRID_H"]
c = color_palette[iobj]
iobj += 1
xmin = x - 0.5*w
ymin = y - 0.5*h
xmax = x + 0.5*w
ymax = y + 0.5*h
# center
plt.text(x*multx,y*multy,
"X",color=c,fontsize=23)
plt.plot(np.array([xmin,xmin])*multx,
np.array([ymin,ymax])*multy,color=c,linewidth=10)
plt.plot(np.array([xmin,xmax])*multx,
np.array([ymin,ymin])*multy,color=c,linewidth=10)
plt.plot(np.array([xmax,xmax])*multx,
np.array([ymax,ymin])*multy,color=c,linewidth=10)
plt.plot(np.array([xmin,xmax])*multx,
np.array([ymax,ymax])*multy,color=c,linewidth=10)
plot_image_with_grid_cell_partition(iframe)
plot_grid(iframe)
plt.show()
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
for irow in range(5, 10):
print("-"*30)
check_object_in_grid_anchor_pair(irow)
plot_image_with_grid_cell_partition(irow)
plot_grid(irow)
plt.show()
------------------------------
igrid_h=07,igrid_w=05,iAnchor=03, person
igrid_h=08,igrid_w=05,iAnchor=03, person
igrid_h=09,igrid_w=05,iAnchor=02, sofa
igrid_h=08,igrid_w=06,iAnchor=02, bird
igrid_h=09,igrid_w=08,iAnchor=02, sofa
igrid_h=05,igrid_w=06,iAnchor=02, dog
igrid_h=06,igrid_w=06,iAnchor=02, car
Next, I am adding a function to prepare the input and the output. The input is a (448, 448, 3) image and the output is a (7, 7, 30) tensor. The output is based on S x S x (B * 5 +C).
S X S is the number of grids
B is the number of bounding boxes per grid
C is the number of predictions per grid
Training the model Next, I am defining a custom generator that returns a batch of input and outputs.
Next, we create instances of the generator for our training and validation sets.
Define a custom output layer We need to reshape the output from the model so we define a custom Keras layer for it.
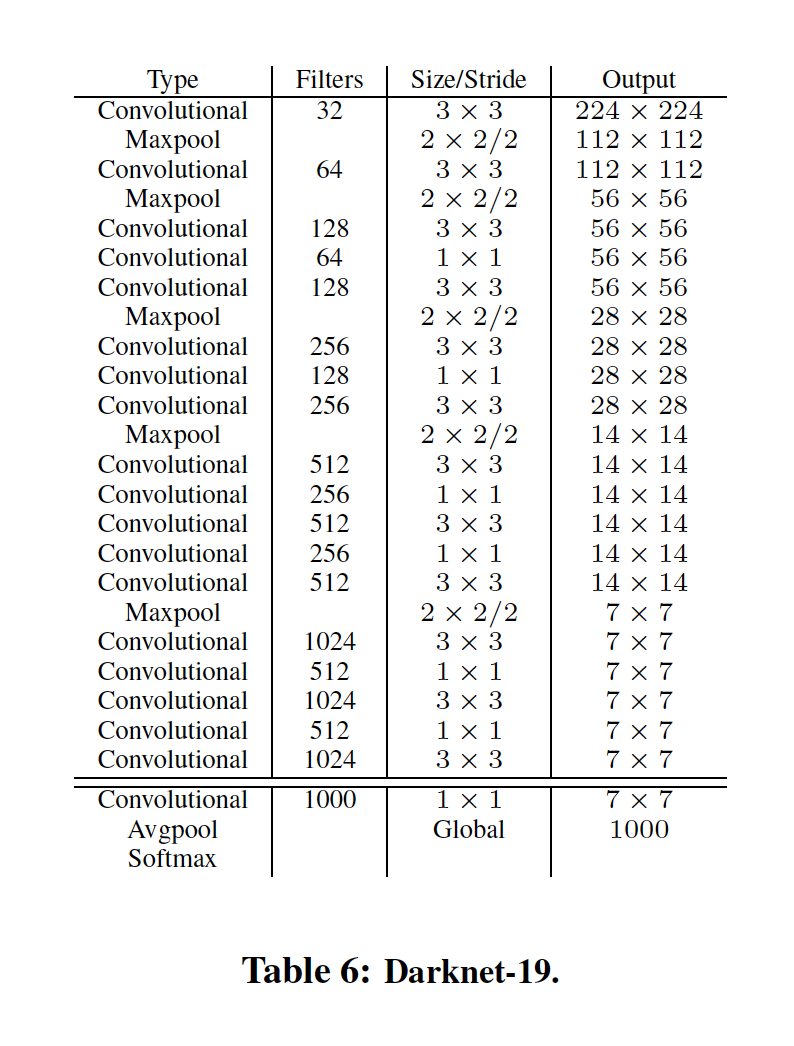
Defining the YOLO model. Next, we define the model as described in the original paper.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
from tensorflow.keras.models import Sequential, Model
from tensorflow.keras.layers import Reshape, Activation, Conv2D, Input, MaxPooling2D, BatchNormalization, Flatten, Dense, Lambda, LeakyReLU, concatenate
from tensorflow.keras.callbacks import EarlyStopping, ModelCheckpoint, TensorBoard
from tensorflow.keras.optimizers import SGD, Adam, RMSprop
import tensorflow.keras.backend as K
import tensorflow as tf
# the function to implement the orgnization layer (thanks to github.com/allanzelener/YAD2K)
def space_to_depth_x2(x):
return tf.nn.space_to_depth(x, block_size=2)
input_image = Input(shape=(IMAGE_H, IMAGE_W, 3))
true_boxes = Input(shape=(1, 1, 1, TRUE_BOX_BUFFER , 4))
# Layer 1
x = Conv2D(32, (3,3), strides=(1,1), padding='same', name='conv_1', use_bias=False)(input_image)
x = BatchNormalization(name='norm_1')(x)
x = LeakyReLU(alpha=0.1)(x)
x = MaxPooling2D(pool_size=(2, 2))(x)
# Layer 2
x = Conv2D(64, (3,3), strides=(1,1), padding='same', name='conv_2', use_bias=False)(x)
x = BatchNormalization(name='norm_2')(x)
x = LeakyReLU(alpha=0.1)(x)
x = MaxPooling2D(pool_size=(2, 2))(x)
# Layer 3
x = Conv2D(128, (3,3), strides=(1,1), padding='same', name='conv_3', use_bias=False)(x)
x = BatchNormalization(name='norm_3')(x)
x = LeakyReLU(alpha=0.1)(x)
# Layer 4
x = Conv2D(64, (1,1), strides=(1,1), padding='same', name='conv_4', use_bias=False)(x)
x = BatchNormalization(name='norm_4')(x)
x = LeakyReLU(alpha=0.1)(x)
# Layer 5
x = Conv2D(128, (3,3), strides=(1,1), padding='same', name='conv_5', use_bias=False)(x)
x = BatchNormalization(name='norm_5')(x)
x = LeakyReLU(alpha=0.1)(x)
x = MaxPooling2D(pool_size=(2, 2))(x)
# Layer 6
x = Conv2D(256, (3,3), strides=(1,1), padding='same', name='conv_6', use_bias=False)(x)
x = BatchNormalization(name='norm_6')(x)
x = LeakyReLU(alpha=0.1)(x)
# Layer 7
x = Conv2D(128, (1,1), strides=(1,1), padding='same', name='conv_7', use_bias=False)(x)
x = BatchNormalization(name='norm_7')(x)
x = LeakyReLU(alpha=0.1)(x)
# Layer 8
x = Conv2D(256, (3,3), strides=(1,1), padding='same', name='conv_8', use_bias=False)(x)
x = BatchNormalization(name='norm_8')(x)
x = LeakyReLU(alpha=0.1)(x)
x = MaxPooling2D(pool_size=(2, 2))(x)
# Layer 9
x = Conv2D(512, (3,3), strides=(1,1), padding='same', name='conv_9', use_bias=False)(x)
x = BatchNormalization(name='norm_9')(x)
x = LeakyReLU(alpha=0.1)(x)
# Layer 10
x = Conv2D(256, (1,1), strides=(1,1), padding='same', name='conv_10', use_bias=False)(x)
x = BatchNormalization(name='norm_10')(x)
x = LeakyReLU(alpha=0.1)(x)
# Layer 11
x = Conv2D(512, (3,3), strides=(1,1), padding='same', name='conv_11', use_bias=False)(x)
x = BatchNormalization(name='norm_11')(x)
x = LeakyReLU(alpha=0.1)(x)
# Layer 12
x = Conv2D(256, (1,1), strides=(1,1), padding='same', name='conv_12', use_bias=False)(x)
x = BatchNormalization(name='norm_12')(x)
x = LeakyReLU(alpha=0.1)(x)
# Layer 13
x = Conv2D(512, (3,3), strides=(1,1), padding='same', name='conv_13', use_bias=False)(x)
x = BatchNormalization(name='norm_13')(x)
x = LeakyReLU(alpha=0.1)(x)
skip_connection = x
x = MaxPooling2D(pool_size=(2, 2))(x)
# Layer 14
x = Conv2D(1024, (3,3), strides=(1,1), padding='same', name='conv_14', use_bias=False)(x)
x = BatchNormalization(name='norm_14')(x)
x = LeakyReLU(alpha=0.1)(x)
# Layer 15
x = Conv2D(512, (1,1), strides=(1,1), padding='same', name='conv_15', use_bias=False)(x)
x = BatchNormalization(name='norm_15')(x)
x = LeakyReLU(alpha=0.1)(x)
# Layer 16
x = Conv2D(1024, (3,3), strides=(1,1), padding='same', name='conv_16', use_bias=False)(x)
x = BatchNormalization(name='norm_16')(x)
x = LeakyReLU(alpha=0.1)(x)
# Layer 17
x = Conv2D(512, (1,1), strides=(1,1), padding='same', name='conv_17', use_bias=False)(x)
x = BatchNormalization(name='norm_17')(x)
x = LeakyReLU(alpha=0.1)(x)
# Layer 18
x = Conv2D(1024, (3,3), strides=(1,1), padding='same', name='conv_18', use_bias=False)(x)
x = BatchNormalization(name='norm_18')(x)
x = LeakyReLU(alpha=0.1)(x)
# Layer 19
x = Conv2D(1024, (3,3), strides=(1,1), padding='same', name='conv_19', use_bias=False)(x)
x = BatchNormalization(name='norm_19')(x)
x = LeakyReLU(alpha=0.1)(x)
# Layer 20
x = Conv2D(1024, (3,3), strides=(1,1), padding='same', name='conv_20', use_bias=False)(x)
x = BatchNormalization(name='norm_20')(x)
x = LeakyReLU(alpha=0.1)(x)
# Layer 21
skip_connection = Conv2D(64, (1,1), strides=(1,1), padding='same', name='conv_21', use_bias=False)(skip_connection)
skip_connection = BatchNormalization(name='norm_21')(skip_connection)
skip_connection = LeakyReLU(alpha=0.1)(skip_connection)
skip_connection = Lambda(space_to_depth_x2)(skip_connection)
x = concatenate([skip_connection, x])
# Layer 22
x = Conv2D(1024, (3,3), strides=(1,1), padding='same', name='conv_22', use_bias=False)(x)
x = BatchNormalization(name='norm_22')(x)
x = LeakyReLU(alpha=0.1)(x)
# Layer 23
x = Conv2D(BOX * (4 + 1 + CLASS), (1,1), strides=(1,1), padding='same', name='conv_23')(x)
output = Reshape((GRID_H, GRID_W, BOX, 4 + 1 + CLASS))(x)
# small hack to allow true_boxes to be registered when Keras build the model
# for more information: https://github.com/fchollet/keras/issues/2790
output = Lambda(lambda args: args[0])([output, true_boxes])
model = Model([input_image, true_boxes], output)
model.summary()
Model: "model_1"
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
Layer (type) Output Shape Param # Connected to
==================================================================================================
input_3 (InputLayer) [(None, 416, 416, 3) 0
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_1 (Conv2D) (None, 416, 416, 32) 864 input_ 3[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_1 (BatchNormalization) (None, 416, 416, 32) 128 conv_ 1[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_22 (LeakyReLU) (None, 416, 416, 32) 0 norm_ 1[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
max_pooling2d_ 5 (MaxPooling2D) (None, 208, 208, 32) 0 leaky_re_ lu_22[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_2 (Conv2D) (None, 208, 208, 64) 18432 max_ pooling2d_5[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_2 (BatchNormalization) (None, 208, 208, 64) 256 conv_ 2[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_23 (LeakyReLU) (None, 208, 208, 64) 0 norm_ 2[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
max_pooling2d_ 6 (MaxPooling2D) (None, 104, 104, 64) 0 leaky_re_ lu_23[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_3 (Conv2D) (None, 104, 104, 128 73728 max_ pooling2d_6[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_3 (BatchNormalization) (None, 104, 104, 128 512 conv_ 3[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_24 (LeakyReLU) (None, 104, 104, 128 0 norm_ 3[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_4 (Conv2D) (None, 104, 104, 64) 8192 leaky_ re_lu_ 24[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_4 (BatchNormalization) (None, 104, 104, 64) 256 conv_ 4[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_25 (LeakyReLU) (None, 104, 104, 64) 0 norm_ 4[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_5 (Conv2D) (None, 104, 104, 128 73728 leaky_ re_lu_ 25[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_5 (BatchNormalization) (None, 104, 104, 128 512 conv_ 5[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_26 (LeakyReLU) (None, 104, 104, 128 0 norm_ 5[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
max_pooling2d_ 7 (MaxPooling2D) (None, 52, 52, 128) 0 leaky_re_ lu_26[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_6 (Conv2D) (None, 52, 52, 256) 294912 max_ pooling2d_7[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_6 (BatchNormalization) (None, 52, 52, 256) 1024 conv_ 6[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_27 (LeakyReLU) (None, 52, 52, 256) 0 norm_ 6[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_7 (Conv2D) (None, 52, 52, 128) 32768 leaky_ re_lu_ 27[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_7 (BatchNormalization) (None, 52, 52, 128) 512 conv_ 7[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_28 (LeakyReLU) (None, 52, 52, 128) 0 norm_ 7[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_8 (Conv2D) (None, 52, 52, 256) 294912 leaky_ re_lu_ 28[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_8 (BatchNormalization) (None, 52, 52, 256) 1024 conv_ 8[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_29 (LeakyReLU) (None, 52, 52, 256) 0 norm_ 8[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
max_pooling2d_ 8 (MaxPooling2D) (None, 26, 26, 256) 0 leaky_re_ lu_29[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_9 (Conv2D) (None, 26, 26, 512) 1179648 max_ pooling2d_8[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_9 (BatchNormalization) (None, 26, 26, 512) 2048 conv_ 9[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_30 (LeakyReLU) (None, 26, 26, 512) 0 norm_ 9[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_10 (Conv2D) (None, 26, 26, 256) 131072 leaky_ re_lu_ 30[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_10 (BatchNormalization) (None, 26, 26, 256) 1024 conv_ 10[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_31 (LeakyReLU) (None, 26, 26, 256) 0 norm_ 10[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_11 (Conv2D) (None, 26, 26, 512) 1179648 leaky_ re_lu_ 31[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_11 (BatchNormalization) (None, 26, 26, 512) 2048 conv_ 11[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_32 (LeakyReLU) (None, 26, 26, 512) 0 norm_ 11[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_12 (Conv2D) (None, 26, 26, 256) 131072 leaky_ re_lu_ 32[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_12 (BatchNormalization) (None, 26, 26, 256) 1024 conv_ 12[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_33 (LeakyReLU) (None, 26, 26, 256) 0 norm_ 12[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_13 (Conv2D) (None, 26, 26, 512) 1179648 leaky_ re_lu_ 33[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_13 (BatchNormalization) (None, 26, 26, 512) 2048 conv_ 13[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_34 (LeakyReLU) (None, 26, 26, 512) 0 norm_ 13[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
max_pooling2d_ 9 (MaxPooling2D) (None, 13, 13, 512) 0 leaky_re_ lu_34[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_14 (Conv2D) (None, 13, 13, 1024) 4718592 max_ pooling2d_9[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_14 (BatchNormalization) (None, 13, 13, 1024) 4096 conv_ 14[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_35 (LeakyReLU) (None, 13, 13, 1024) 0 norm_ 14[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_15 (Conv2D) (None, 13, 13, 512) 524288 leaky_ re_lu_ 35[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_15 (BatchNormalization) (None, 13, 13, 512) 2048 conv_ 15[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_36 (LeakyReLU) (None, 13, 13, 512) 0 norm_ 15[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_16 (Conv2D) (None, 13, 13, 1024) 4718592 leaky_ re_lu_ 36[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_16 (BatchNormalization) (None, 13, 13, 1024) 4096 conv_ 16[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_37 (LeakyReLU) (None, 13, 13, 1024) 0 norm_ 16[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_17 (Conv2D) (None, 13, 13, 512) 524288 leaky_ re_lu_ 37[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_17 (BatchNormalization) (None, 13, 13, 512) 2048 conv_ 17[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_38 (LeakyReLU) (None, 13, 13, 512) 0 norm_ 17[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_18 (Conv2D) (None, 13, 13, 1024) 4718592 leaky_ re_lu_ 38[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_18 (BatchNormalization) (None, 13, 13, 1024) 4096 conv_ 18[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_39 (LeakyReLU) (None, 13, 13, 1024) 0 norm_ 18[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_19 (Conv2D) (None, 13, 13, 1024) 9437184 leaky_ re_lu_ 39[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_19 (BatchNormalization) (None, 13, 13, 1024) 4096 conv_ 19[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_21 (Conv2D) (None, 26, 26, 64) 32768 leaky_ re_lu_ 34[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_40 (LeakyReLU) (None, 13, 13, 1024) 0 norm_ 19[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_21 (BatchNormalization) (None, 26, 26, 64) 256 conv_ 21[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_20 (Conv2D) (None, 13, 13, 1024) 9437184 leaky_ re_lu_ 40[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_42 (LeakyReLU) (None, 26, 26, 64) 0 norm_ 21[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_20 (BatchNormalization) (None, 13, 13, 1024) 4096 conv_ 20[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
lambda_2 (Lambda) (None, 13, 13, 256) 0 leaky_ re_lu_ 42[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_41 (LeakyReLU) (None, 13, 13, 1024) 0 norm_ 20[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
concatenate_1 (Concatenate) (None, 13, 13, 1280) 0 lambda_ 2[0 ][0 ]
leaky_re_lu_41[0][0]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_22 (Conv2D) (None, 13, 13, 1024) 11796480 concatenate_ 1[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
norm_22 (BatchNormalization) (None, 13, 13, 1024) 4096 conv_ 22[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
leaky_re_ lu_43 (LeakyReLU) (None, 13, 13, 1024) 0 norm_ 22[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
conv_23 (Conv2D) (None, 13, 13, 100) 102500 leaky_ re_lu_ 43[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
reshape_1 (Reshape) (None, 13, 13, 4, 25 0 conv_ 23[0 ][0 ]
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
input_4 (InputLayer) [(None, 1, 1, 1, 50, 0
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
lambda_3 (Lambda) (None, 13, 13, 4, 25 0 reshape_ 1[0 ][0 ]
input_4[0][0]
==================================================================================================
Total params: 50,650,436
Trainable params: 50,629,764
Non-trainable params: 20,672
_____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ _____ ___
Next, we download the pre-trained weights for YOLO V2.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
!wget https://pjreddie.com/media/files/yolov2.weights
--2020-07-06 21 :02:41-- https://pjreddie.com/media/files/yolov2.weights
Resolving pjreddie.com (pjreddie.com)... 128.208 .4 .108
Connecting to pjreddie.com (pjreddie.com)|128.208.4.108|:443... connected.
HTTP request sent, awaiting response... 200 OK
Length: 203934260 (194M) [application/octet-stream]
Saving to: ‘yolov2.weights.1’
yolov2.weights.1 100 %[===================>] 194. 49M 867KB/s in 3m 6s
2020 -07 -06 21 :05:47 (1.05 MB/s) - ‘yolov2.weights.1’ saved [203934260/203934260]
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
path_to_weight = "./yolov2.weights"
class WeightReader:
def __init__(self, weight_file):
self.offset = 4
self.all_weights = np.fromfile(weight_file, dtype='float32')
def read_bytes(self, size):
self.offset = self.offset + size
return self.all_weights[self.offset-size:self.offset]
def reset(self):
self.offset = 4
weight_reader = WeightReader(path_to_weight)
print("all_weights.shape = {}".format(weight_reader.all_weights.shape))
all_weights.shape = (50983565 ,)
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
weight_reader.reset()
nb_conv = 23
for i in range(1, nb_conv+1):
conv_layer = model.get_layer('conv_' + str(i))
if i < nb_conv:
norm_layer = model.get_layer('norm_' + str(i))
size = np.prod(norm_layer.get_weights()[0].shape)
beta = weight_reader.read_bytes(size)
gamma = weight_reader.read_bytes(size)
mean = weight_reader.read_bytes(size)
var = weight_reader.read_bytes(size)
weights = norm_layer.set_weights([gamma, beta, mean, var])
if len(conv_layer.get_weights()) > 1:
bias = weight_reader.read_bytes(np.prod(conv_layer.get_weights()[1].shape))
kernel = weight_reader.read_bytes(np.prod(conv_layer.get_weights()[0].shape))
kernel = kernel.reshape(list(reversed(conv_layer.get_weights()[0].shape)))
kernel = kernel.transpose([2,3,1,0])
conv_layer.set_weights([kernel, bias])
else:
kernel = weight_reader.read_bytes(np.prod(conv_layer.get_weights()[0].shape))
kernel = kernel.reshape(list(reversed(conv_layer.get_weights()[0].shape)))
kernel = kernel.transpose([2,3,1,0])
conv_layer.set_weights([kernel])
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
layer = model.layers[-4] # the last convolutional layer
weights = layer.get_weights()
new_kernel = np.random.normal(size=weights[0].shape)/(GRID_H*GRID_W)
new_bias = np.random.normal(size=weights[1].shape)/(GRID_H*GRID_W)
layer.set_weights([new_kernel, new_bias])
Define a custom learning rate scheduler The paper uses different learning rates for different epochs. So we define a custom Callback function for the learning rate.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
from tensorflow import keras
class CustomLearningRateScheduler(keras.callbacks.Callback):
def __init__(self, schedule):
super(CustomLearningRateScheduler, self).__init__()
self.schedule = schedule
def on_epoch_begin(self, epoch, logs=None):
if not hasattr(self.model.optimizer, "lr"):
raise ValueError('Optimizer must have a "lr" attribute.')
# Get the current learning rate from model's optimizer.
lr = float(tf.keras.backend.get_value(self.model.optimizer.learning_rate))
# Call schedule function to get the scheduled learning rate.
scheduled_lr = self.schedule(epoch, lr)
# Set the value back to the optimizer before this epoch starts
tf.keras.backend.set_value(self.model.optimizer.lr, scheduled_lr)
print("\nEpoch %05d: Learning rate is %6.4f." % (epoch, scheduled_lr))
LR_SCHEDULE = [
# (epoch to start, learning rate) tuples
(0, 0.01),
(75, 0.001),
(105, 0.0001),
]
def lr_schedule(epoch, lr):
"""Helper function to retrieve the scheduled learning rate based on epoch."""
if epoch < LR_SCHEDULE[0][0] or epoch > LR_SCHEDULE[-1][0]:
return lr
for i in range(len(LR_SCHEDULE)):
if epoch == LR_SCHEDULE[i][0]:
return LR_SCHEDULE[i][1]
return lr
Define the loss function Next, we would be defining a custom loss function to be used in the model. Take a look at this blog post to understand more about the
loss function used in YOLO .
I understood the loss function but didn’t implement it on my own. I took the implementation as it is from the above
blog post .
The original blog post was using Tensorflow 1.x so I had to update some of the code to make it run it on Tensorflow 2.x.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
LAMBDA_NO_OBJECT = 1.0
LAMBDA_OBJECT = 5.0
LAMBDA_COORD = 1.0
LAMBDA_CLASS = 1.0
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
def get_cell_grid(GRID_W,GRID_H,BATCH_SIZE,BOX):
'''
Helper function to assure that the bounding box x and y are in the grid cell scale
== output ==
for any i=0,1..,batch size - 1
output[i,5,3,:,:] = array([[3., 5.],
[3., 5.],
[3., 5.]], dtype=float32)
'''
## cell_x.shape = (1, 13, 13, 1, 1)
## cell_x[:,i,j,:] = [[[j]]]
cell_x = tf.cast(tf.reshape(tf.tile(tf.range(GRID_W), [GRID_H]), (1, GRID_H, GRID_W, 1, 1)), tf.float32)
## cell_y.shape = (1, 13, 13, 1, 1)
## cell_y[:,i,j,:] = [[[i]]]
cell_y = tf.transpose(cell_x, (0,2,1,3,4))
## cell_gird.shape = (16, 13, 13, 5, 2)
## for any n, k, i, j
## cell_grid[n, i, j, anchor, k] = j when k = 0
## for any n, k, i, j
## cell_grid[n, i, j, anchor, k] = i when k = 1
cell_grid = tf.tile(tf.concat([cell_x,cell_y], -1), [BATCH_SIZE, 1, 1, BOX, 1])
return(cell_grid)
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
def adjust_scale_prediction(y_pred, cell_grid, ANCHORS):
"""
Adjust prediction
== input ==
y_pred : takes any real values
tensor of shape = (N batch, NGrid h, NGrid w, NAnchor, 4 + 1 + N class)
ANCHORS : list containing width and height specializaiton of anchor box
== output ==
pred_box_xy : shape = (N batch, N grid x, N grid y, N anchor, 2), contianing [center_y, center_x] rangining [0,0]x[grid_H-1,grid_W-1]
pred_box_xy[irow,igrid_h,igrid_w,ianchor,0] = center_x
pred_box_xy[irow,igrid_h,igrid_w,ianchor,1] = center_1
calculation process:
tf.sigmoid(y_pred[...,:2]) : takes values between 0 and 1
tf.sigmoid(y_pred[...,:2]) + cell_grid : takes values between 0 and grid_W - 1 for x coordinate
takes values between 0 and grid_H - 1 for y coordinate
pred_Box_wh : shape = (N batch, N grid h, N grid w, N anchor, 2), containing width and height, rangining [0,0]x[grid_H-1,grid_W-1]
pred_box_conf : shape = (N batch, N grid h, N grid w, N anchor, 1), containing confidence to range between 0 and 1
pred_box_class : shape = (N batch, N grid h, N grid w, N anchor, N class), containing
"""
BOX = int(len(ANCHORS)/2)
## cell_grid is of the shape of
### adjust x and y
# the bounding box bx and by are rescaled to range between 0 and 1 for given gird.
# Since there are BOX x BOX grids, we rescale each bx and by to range between 0 to BOX + 1
pred_box_xy = tf.sigmoid(y_pred[..., :2]) + cell_grid # bx, by
### adjust w and h
# exp to make width and height positive
# rescale each grid to make some anchor "good" at representing certain shape of bounding box
pred_box_wh = tf.exp(y_pred[..., 2:4]) * np.reshape(ANCHORS,[1,1,1,BOX,2]) # bw, bh
### adjust confidence
pred_box_conf = tf.sigmoid(y_pred[..., 4])# prob bb
### adjust class probabilities
pred_box_class = y_pred[..., 5:] # prC1, prC2, ..., prC20
return(pred_box_xy,pred_box_wh,pred_box_conf,pred_box_class)
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
def print_min_max(vec,title):
try:
print("{} MIN={:5.2f}, MAX={:5.2f}".format(
title,np.min(vec),np.max(vec)))
except ValueError: #raised if `y` is empty.
pass
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
print("*"*30)
print("prepare inputs")
GRID_W = 13
GRID_H = 13
BOX = int(len(ANCHORS)/2)
CLASS = len(LABELS)
size = BATCH_SIZE*GRID_W*GRID_H*BOX*(4 + 1 + CLASS)
y_pred = np.random.normal(size=size,scale = 10/(GRID_H*GRID_W))
y_pred = y_pred.reshape(BATCH_SIZE,GRID_H,GRID_W,BOX,4 + 1 + CLASS)
print("y_pred before scaling = {}".format(y_pred.shape))
print("*"*30)
print("define tensor graph")
y_pred_tf = tf.constant(y_pred,dtype="float32")
cell_grid = get_cell_grid(GRID_W,GRID_H,BATCH_SIZE,BOX)
(pred_box_xy, pred_box_wh, pred_box_conf, pred_box_class) = adjust_scale_prediction(y_pred_tf,
cell_grid,
ANCHORS)
print("*"*30 + "\nouput\n" + "*"*30)
print("\npred_box_xy {}".format(pred_box_xy.shape))
for igrid_w in range(pred_box_xy.shape[2]):
print_min_max(pred_box_xy[:,:,igrid_w,:,0],
" bounding box x at iGRID_W={:02.0f}".format(igrid_w))
for igrid_h in range(pred_box_xy.shape[1]):
print_min_max(pred_box_xy[:,igrid_h,:,:,1],
" bounding box y at iGRID_H={:02.0f}".format(igrid_h))
print("\npred_box_wh {}".format(pred_box_wh.shape))
print_min_max(pred_box_wh[:,:,:,:,0]," bounding box width ")
print_min_max(pred_box_wh[:,:,:,:,1]," bounding box height")
print("\npred_box_conf {}".format(pred_box_conf.shape))
print_min_max(pred_box_conf," confidence ")
print("\npred_box_class {}".format(pred_box_class.shape))
print_min_max(pred_box_class," class probability")
******************************
prepare inputs
y_pred before scaling = (16, 13 , 13 , 4 , 25 )
******************************
define tensor graph
******************************
ouput
******************************
pred_box_xy (16, 13 , 13 , 4 , 2 )
bounding box x at iGRID_W=00 MIN= 0.45 , MAX= 0.55
bounding box x at iGRID_W=01 MIN= 1.45 , MAX= 1.54
bounding box x at iGRID_W=02 MIN= 2.45 , MAX= 2.55
bounding box x at iGRID_W=03 MIN= 3.45 , MAX= 3.55
bounding box x at iGRID_W=04 MIN= 4.45 , MAX= 4.55
bounding box x at iGRID_W=05 MIN= 5.45 , MAX= 5.55
bounding box x at iGRID_W=06 MIN= 6.46 , MAX= 6.55
bounding box x at iGRID_W=07 MIN= 7.45 , MAX= 7.55
bounding box x at iGRID_W=08 MIN= 8.46 , MAX= 8.55
bounding box x at iGRID_W=09 MIN= 9.44 , MAX= 9.55
bounding box x at iGRID_W=10 MIN=10.46, MAX=10.55
bounding box x at iGRID_W=11 MIN=11.46, MAX=11.55
bounding box x at iGRID_W=12 MIN=12.45, MAX=12.55
bounding box y at iGRID_H=00 MIN= 0.45 , MAX= 0.55
bounding box y at iGRID_H=01 MIN= 1.45 , MAX= 1.54
bounding box y at iGRID_H=02 MIN= 2.46 , MAX= 2.54
bounding box y at iGRID_H=03 MIN= 3.45 , MAX= 3.55
bounding box y at iGRID_H=04 MIN= 4.45 , MAX= 4.54
bounding box y at iGRID_H=05 MIN= 5.45 , MAX= 5.54
bounding box y at iGRID_H=06 MIN= 6.45 , MAX= 6.55
bounding box y at iGRID_H=07 MIN= 7.45 , MAX= 7.55
bounding box y at iGRID_H=08 MIN= 8.46 , MAX= 8.54
bounding box y at iGRID_H=09 MIN= 9.46 , MAX= 9.55
bounding box y at iGRID_H=10 MIN=10.45, MAX=10.54
bounding box y at iGRID_H=11 MIN=11.46, MAX=11.54
bounding box y at iGRID_H=12 MIN=12.45, MAX=12.54
pred_box_wh (16, 13 , 13 , 4 , 2 )
bounding box width MIN= 0.88 , MAX=12.49
bounding box height MIN= 1.46 , MAX=12.64
pred_box_conf (16, 13 , 13 , 4 )
confidence MIN= 0.45 , MAX= 0.56
pred_box_class (16, 13 , 13 , 4 , 20 )
class probability MIN=-0.26, MAX= 0.28
We extract the ground truth.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
def extract_ground_truth(y_true):
true_box_xy = y_true[..., 0:2] # bounding box x, y coordinate in grid cell scale
true_box_wh = y_true[..., 2:4] # number of cells accross, horizontally and vertically
true_box_conf = y_true[...,4] # confidence
true_box_class = tf.argmax(y_true[..., 5:], -1)
return(true_box_xy, true_box_wh, true_box_conf, true_box_class)
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
# y_batch is the output of the simpleBatchGenerator.fit()
print("Input y_batch = {}".format(y_batch.shape))
y_batch_tf = tf.constant(y_batch,dtype="float32")
(true_box_xy, true_box_wh,
true_box_conf, true_box_class) = extract_ground_truth(y_batch_tf)
print("*"*30 + "\nouput\n" + "*"*30)
print("\ntrue_box_xy {}".format(true_box_xy.shape))
for igrid_w in range(true_box_xy.shape[2]):
vec = true_box_xy[:,:,igrid_w,:,0]
pick = true_box_conf[:,:,igrid_w,:] == 1 ## only pick C_ij = 1
print_min_max(vec[pick]," bounding box x at iGRID_W={:02.0f}".format(igrid_w))
for igrid_h in range(true_box_xy.shape[1]):
vec = true_box_xy[:,igrid_h,:,:,1]
pick = true_box_conf[:,igrid_h,:,:] == 1 ## only pick C_ij = 1
print_min_max(vec[pick]," bounding box y at iGRID_H={:02.0f}".format(igrid_h))
print("\ntrue_box_wh {}".format(true_box_wh.shape))
print_min_max(true_box_wh[:,:,:,:,0]," bounding box width ")
print_min_max(true_box_wh[:,:,:,:,1]," bounding box height")
print("\ntrue_box_conf {}".format(true_box_conf.shape))
print(" confidence, unique value = {}".format(np.unique(true_box_conf)))
print("\ntrue_box_class {}".format(true_box_class.shape))
print(" class index, unique value = {}".format(np.unique(true_box_class)) )
Input y_batch = (16, 13 , 13 , 4 , 25 )
******************************
ouput
******************************
true_box_xy (16, 13 , 13 , 4 , 2 )
bounding box x at iGRID_W=01 MIN= 1.56 , MAX= 1.56
bounding box x at iGRID_W=02 MIN= 2.36 , MAX= 2.36
bounding box x at iGRID_W=03 MIN= 3.09 , MAX= 3.41
bounding box x at iGRID_W=05 MIN= 5.00 , MAX= 5.94
bounding box x at iGRID_W=06 MIN= 6.22 , MAX= 6.67
bounding box x at iGRID_W=07 MIN= 7.66 , MAX= 7.66
bounding box x at iGRID_W=08 MIN= 8.56 , MAX= 8.86
bounding box x at iGRID_W=09 MIN= 9.09 , MAX= 9.39
bounding box y at iGRID_H=01 MIN= 1.58 , MAX= 1.58
bounding box y at iGRID_H=05 MIN= 5.34 , MAX= 5.42
bounding box y at iGRID_H=06 MIN= 6.50 , MAX= 6.91
bounding box y at iGRID_H=07 MIN= 7.02 , MAX= 7.38
bounding box y at iGRID_H=08 MIN= 8.08 , MAX= 8.64
bounding box y at iGRID_H=09 MIN= 9.20 , MAX= 9.88
bounding box y at iGRID_H=10 MIN=10.14, MAX=10.36
bounding box y at iGRID_H=11 MIN=11.11, MAX=11.42
true_box_wh (16, 13 , 13 , 4 , 2 )
bounding box width MIN= 0.00 , MAX=12.97
bounding box height MIN= 0.00 , MAX=13.00
true_box_conf (16, 13 , 13 , 4 )
confidence, unique value = [0. 1 .]
true_box_class (16, 13 , 13 , 4 )
class index, unique value = [ 0 2 6 7 8 11 14 15 17 19 ]
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
def calc_loss_xywh(true_box_conf, COORD_SCALE, true_box_xy, pred_box_xy, true_box_wh, pred_box_wh):
coord_mask = tf.expand_dims(true_box_conf, axis=-1) * LAMBDA_COORD
nb_coord_box = tf.reduce_sum(tf.cast(coord_mask > 0.0, tf.float32))
loss_xy = tf.reduce_sum(tf.square(true_box_xy-pred_box_xy) * coord_mask) / (nb_coord_box + 1e-6) / 2.
loss_wh = tf.reduce_sum(tf.square(true_box_wh-pred_box_wh) * coord_mask) / (nb_coord_box + 1e-6) / 2.
return (loss_xy + loss_wh, coord_mask)
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
LAMBDA_COORD = 1
loss_xywh, coord_mask = calc_loss_xywh(true_box_conf, LAMBDA_COORD, true_box_xy, pred_box_xy,true_box_wh, pred_box_wh)
print("*"*30 + "\nouput\n" + "*"*30)
print("loss_xywh = {:4.3f}".format(loss_xywh))
***** ***** ***** ***** ***** *****
ouput
***** ***** ***** ***** ***** *****
loss_xywh = 4.148
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
def calc_loss_class(true_box_conf,CLASS_SCALE, true_box_class,pred_box_class):
'''
== input ==
true_box_conf : tensor of shape (N batch, N grid h, N grid w, N anchor)
true_box_class : tensor of shape (N batch, N grid h, N grid w, N anchor), containing class index
pred_box_class : tensor of shape (N batch, N grid h, N grid w, N anchor, N class)
CLASS_SCALE : 1.0
== output ==
class_mask
if object exists in this (grid_cell, anchor) pair and the class object receive nonzero weight
class_mask[iframe,igridy,igridx,ianchor] = 1
else:
0
'''
class_mask = true_box_conf * CLASS_SCALE ## L_{i,j}^obj * lambda_class
nb_class_box = tf.reduce_sum(tf.cast(class_mask > 0.0, tf.float32))
loss_class = tf.nn.sparse_softmax_cross_entropy_with_logits(labels = true_box_class,
logits = pred_box_class)
loss_class = tf.reduce_sum(loss_class * class_mask) / (nb_class_box + 1e-6)
return(loss_class)
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
LAMBDA_CLASS = 1
loss_class = calc_loss_class(true_box_conf,LAMBDA_CLASS,
true_box_class,pred_box_class)
print("*"*30 + "\nouput\n" + "*"*30)
print("loss_class = {:4.3f}".format(loss_class))
***** ***** ***** ***** ***** *****
ouput
***** ***** ***** ***** ***** *****
loss_class = 3.018
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
def get_intersect_area(true_xy,true_wh,
pred_xy,pred_wh):
'''
== INPUT ==
true_xy,pred_xy, true_wh and pred_wh must have the same shape length
p1 : pred_mins = (px1,py1)
p2 : pred_maxs = (px2,py2)
t1 : true_mins = (tx1,ty1)
t2 : true_maxs = (tx2,ty2)
p1______________________
| t1___________ |
| | | |
|_______|___________|__|p2
| |rmax
|___________|
t2
intersect_mins : rmin = t1 = (tx1,ty1)
intersect_maxs : rmax = (rmaxx,rmaxy)
intersect_wh : (rmaxx - tx1, rmaxy - ty1)
'''
true_wh_half = true_wh / 2.
true_mins = true_xy - true_wh_half
true_maxes = true_xy + true_wh_half
pred_wh_half = pred_wh / 2.
pred_mins = pred_xy - pred_wh_half
pred_maxes = pred_xy + pred_wh_half
intersect_mins = tf.maximum(pred_mins, true_mins)
intersect_maxes = tf.minimum(pred_maxes, true_maxes)
intersect_wh = tf.maximum(intersect_maxes - intersect_mins, 0.)
intersect_areas = intersect_wh[..., 0] * intersect_wh[..., 1]
true_areas = true_wh[..., 0] * true_wh[..., 1]
pred_areas = pred_wh[..., 0] * pred_wh[..., 1]
union_areas = pred_areas + true_areas - intersect_areas
iou_scores = tf.truediv(intersect_areas, union_areas)
return(iou_scores)
def calc_IOU_pred_true_assigned(true_box_conf,
true_box_xy, true_box_wh,
pred_box_xy, pred_box_wh):
'''
== input ==
true_box_conf : tensor of shape (N batch, N grid h, N grid w, N anchor )
true_box_xy : tensor of shape (N batch, N grid h, N grid w, N anchor , 2)
true_box_wh : tensor of shape (N batch, N grid h, N grid w, N anchor , 2)
pred_box_xy : tensor of shape (N batch, N grid h, N grid w, N anchor , 2)
pred_box_wh : tensor of shape (N batch, N grid h, N grid w, N anchor , 2)
== output ==
true_box_conf : tensor of shape (N batch, N grid h, N grid w, N anchor)
true_box_conf value depends on the predicted values
true_box_conf = IOU_{true,pred} if objecte exist in this anchor else 0
'''
iou_scores = get_intersect_area(true_box_xy,true_box_wh,
pred_box_xy,pred_box_wh)
true_box_conf_IOU = iou_scores * true_box_conf
return(true_box_conf_IOU)
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
true_box_conf_IOU = calc_IOU_pred_true_assigned(
true_box_conf,
true_box_xy, true_box_wh,
pred_box_xy, pred_box_wh)
print("*"*30 + "\ninput\n" + "*"*30)
print("true_box_conf = {}".format(true_box_conf))
print("true_box_xy = {}".format(true_box_xy))
print("true_box_wh = {}".format(true_box_wh))
print("pred_box_xy = {}".format(pred_box_xy))
print("pred_box_wh = {}".format(pred_box_wh))
print("*"*30 + "\nouput\n" + "*"*30)
print("true_box_conf_IOU.shape = {}".format(true_box_conf_IOU.shape))
vec = true_box_conf_IOU
pick = vec!=0
vec = vec[pick]
plt.hist(vec)
plt.title("Histogram\nN (%) nonzero true_box_conf_IOU = {} ({:5.2f}%)".format(np.sum(pick),
100*np.mean(pick)))
plt.xlabel("nonzero true_box_conf_IOU")
plt.show()
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
def calc_IOU_pred_true_best(pred_box_xy,pred_box_wh,true_boxes):
'''
== input ==
pred_box_xy : tensor of shape (N batch, N grid h, N grid w, N anchor, 2)
pred_box_wh : tensor of shape (N batch, N grid h, N grid w, N anchor, 2)
true_boxes : tensor of shape (N batch, N grid h, N grid w, N anchor, 2)
== output ==
best_ious
for each iframe,
best_ious[iframe,igridy,igridx,ianchor] contains
the IOU of the object that is most likely included (or best fitted)
within the bounded box recorded in (grid_cell, anchor) pair
NOTE: a same object may be contained in multiple (grid_cell, anchor) pair
from best_ious, you cannot tell how may actual objects are captured as the "best" object
'''
true_xy = true_boxes[..., 0:2] # (N batch, 1, 1, 1, TRUE_BOX_BUFFER, 2)
true_wh = true_boxes[..., 2:4] # (N batch, 1, 1, 1, TRUE_BOX_BUFFER, 2)
pred_xy = tf.expand_dims(pred_box_xy, 4) # (N batch, N grid_h, N grid_w, N anchor, 1, 2)
pred_wh = tf.expand_dims(pred_box_wh, 4) # (N batch, N grid_h, N grid_w, N anchor, 1, 2)
iou_scores = get_intersect_area(true_xy,
true_wh,
pred_xy,
pred_wh) # (N batch, N grid_h, N grid_w, N anchor, 50)
best_ious = tf.reduce_max(iou_scores, axis=4) # (N batch, N grid_h, N grid_w, N anchor)
return(best_ious)
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
true_boxes = tf.constant(b_batch,dtype="float32")
best_ious = calc_IOU_pred_true_best(pred_box_xy,
pred_box_wh,
true_boxes)
print("*"*30 + "\ninput\n" + "*"*30)
print("true_box_wh = {}".format(true_box_wh))
print("pred_box_xy = {}".format(pred_box_xy))
print("pred_box_wh = {}".format(pred_box_wh))
print("*"*30 + "\nouput\n" + "*"*30)
print("best_ious.shape = {}".format(best_ious.shape))
vec = best_ious
pick = vec!=0
vec = vec[pick]
plt.hist(vec)
plt.title("Histogram\nN (%) nonzero best_ious = {} ({:5.2f}%)".format(np.sum(pick),
100*np.mean(pick)))
plt.xlabel("nonzero best_ious")
plt.show()
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
def get_conf_mask(best_ious, true_box_conf, true_box_conf_IOU,LAMBDA_NO_OBJECT, LAMBDA_OBJECT):
'''
== input ==
best_ious : tensor of shape (Nbatch, N grid h, N grid w, N anchor)
true_box_conf : tensor of shape (Nbatch, N grid h, N grid w, N anchor)
true_box_conf_IOU : tensor of shape (Nbatch, N grid h, N grid w, N anchor)
LAMBDA_NO_OBJECT : 1.0
LAMBDA_OBJECT : 5.0
== output ==
conf_mask : tensor of shape (Nbatch, N grid h, N grid w, N anchor)
conf_mask[iframe, igridy, igridx, ianchor] = 0
when there is no object assigned in (grid cell, anchor) pair and the region seems useless i.e.
y_true[iframe,igridx,igridy,4] = 0 "and" the predicted region has no object that has IoU > 0.6
conf_mask[iframe, igridy, igridx, ianchor] = NO_OBJECT_SCALE
when there is no object assigned in (grid cell, anchor) pair but region seems to include some object
y_true[iframe,igridx,igridy,4] = 0 "and" the predicted region has some object that has IoU > 0.6
conf_mask[iframe, igridy, igridx, ianchor] = OBJECT_SCALE
when there is an object in (grid cell, anchor) pair
'''
conf_mask = tf.cast(best_ious < 0.6, tf.float32) * (1 - true_box_conf) * LAMBDA_NO_OBJECT
# penalize the confidence of the boxes, which are reponsible for corresponding ground truth box
conf_mask = conf_mask + true_box_conf_IOU * LAMBDA_OBJECT
return(conf_mask)
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
conf_mask = get_conf_mask(best_ious,
true_box_conf,
true_box_conf_IOU,
LAMBDA_NO_OBJECT,
LAMBDA_OBJECT)
print("*"*30 + "\ninput\n" + "*"*30)
print("best_ious = {}".format(best_ious))
print("true_box_conf = {}".format(true_box_conf))
print("true_box_conf_IOU = {}".format(true_box_conf_IOU))
print("LAMBDA_NO_OBJECT = {}".format(LAMBDA_NO_OBJECT))
print("LAMBDA_OBJECT = {}".format(LAMBDA_OBJECT))
print("*"*30 + "\noutput\n" + "*"*30)
print("conf_mask shape = {}".format(conf_mask.shape))
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
def calc_loss_conf(conf_mask,true_box_conf_IOU, pred_box_conf):
'''
== input ==
conf_mask : tensor of shape (Nbatch, N grid h, N grid w, N anchor)
true_box_conf_IOU : tensor of shape (Nbatch, N grid h, N grid w, N anchor)
pred_box_conf : tensor of shape (Nbatch, N grid h, N grid w, N anchor)
'''
# the number of (grid cell, anchor) pair that has an assigned object or
# that has no assigned object but some objects may be in bounding box.
# N conf
nb_conf_box = tf.reduce_sum(tf.cast(conf_mask > 0.0, tf.float32))
loss_conf = tf.reduce_sum(tf.square(true_box_conf_IOU-pred_box_conf) * conf_mask) / (nb_conf_box + 1e-6) / 2.
return(loss_conf)
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
print("*"*30 + "\ninput\n" + "*"*30)
print("conf_mask = {}".format(conf_mask))
print("true_box_conf_IOU = {}".format(true_box_conf_IOU))
print("pred_box_conf = {}".format(pred_box_conf))
loss_conf = calc_loss_conf(conf_mask,true_box_conf_IOU, pred_box_conf)
print("*"*30 + "\noutput\n" + "*"*30)
print("loss_conf = {:5.4f}".format(loss_conf))
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
def custom_loss(y_true, y_pred):
'''
y_true : (N batch, N grid h, N grid w, N anchor, 4 + 1 + N classes)
y_true[irow, i_gridh, i_gridw, i_anchor, :4] = center_x, center_y, w, h
center_x : The x coordinate center of the bounding box.
Rescaled to range between 0 and N gird w (e.g., ranging between [0,13)
center_y : The y coordinate center of the bounding box.
Rescaled to range between 0 and N gird h (e.g., ranging between [0,13)
w : The width of the bounding box.
Rescaled to range between 0 and N gird w (e.g., ranging between [0,13)
h : The height of the bounding box.
Rescaled to range between 0 and N gird h (e.g., ranging between [0,13)
y_true[irow, i_gridh, i_gridw, i_anchor, 4] = ground truth confidence
ground truth confidence is 1 if object exists in this (anchor box, gird cell) pair
y_true[irow, i_gridh, i_gridw, i_anchor, 5 + iclass] = 1 if the object is in category else 0
'''
total_recall = tf.Variable(0.)
# Step 1: Adjust prediction output
cell_grid = get_cell_grid(GRID_W,GRID_H,BATCH_SIZE,BOX)
pred_box_xy, pred_box_wh, pred_box_conf, pred_box_class = adjust_scale_prediction(y_pred,cell_grid,ANCHORS)
# Step 2: Extract ground truth output
true_box_xy, true_box_wh, true_box_conf, true_box_class = extract_ground_truth(y_true)
# Step 3: Calculate loss for the bounding box parameters
loss_xywh, coord_mask = calc_loss_xywh(true_box_conf,LAMBDA_COORD,
true_box_xy, pred_box_xy,true_box_wh,pred_box_wh)
# Step 4: Calculate loss for the class probabilities
loss_class = calc_loss_class(true_box_conf,LAMBDA_CLASS,
true_box_class,pred_box_class)
# Step 5: For each (grid cell, anchor) pair,
# calculate the IoU between predicted and ground truth bounding box
true_box_conf_IOU = calc_IOU_pred_true_assigned(true_box_conf,
true_box_xy, true_box_wh,
pred_box_xy, pred_box_wh)
# Step 6: For each predicted bounded box from (grid cell, anchor box),
# calculate the best IOU, regardless of the ground truth anchor box that each object gets assigned.
best_ious = calc_IOU_pred_true_best(pred_box_xy,pred_box_wh,true_boxes)
# Step 7: For each grid cell, calculate the L_{i,j}^{noobj}
conf_mask = get_conf_mask(best_ious, true_box_conf, true_box_conf_IOU,LAMBDA_NO_OBJECT, LAMBDA_OBJECT)
# Step 8: Calculate loss for the confidence
loss_conf = calc_loss_conf(conf_mask,true_box_conf_IOU, pred_box_conf)
loss = loss_xywh + loss_conf + loss_class
return loss
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
print(y_batch.dtype, y_pred.dtype)
true_boxes = tf.Variable(np.zeros_like(b_batch), dtype="float32")
loss = custom_loss(y_batch.astype('float32'), y_pred.astype('float32'))
print('loss', loss)
float64 float64
loss tf.Tensor(7.290645 , shape=(), dtype=float32 )
Add a callback for saving the weights Next, I define a callback to keep saving the best weights.
Compile the model Finally, I compile the model using the custom loss function that was defined above.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
from tensorflow import keras
from tensorflow.keras.callbacks import EarlyStopping, ModelCheckpoint
from tensorflow.keras.optimizers import SGD, Adam, RMSprop
dir_log = "logs/"
try:
os.makedirs(dir_log)
except:
pass
generator_config['BATCH_SIZE'] = BATCH_SIZE
early_stop = EarlyStopping(monitor='loss',
min_delta=0.001,
patience=3,
mode='min',
verbose=1)
checkpoint = ModelCheckpoint('/content/gdrive/My Drive/cv_data/yolo_v2/weights_yolo_on_voc2012.h5',
monitor='loss',
verbose=1,
save_best_only=True,
mode='min',
period=1)
optimizer = Adam(lr=0.5e-4, beta_1=0.9, beta_2=0.999, epsilon=1e-08, decay=0.0)
model.compile(loss=custom_loss ,optimizer=optimizer)
WARNING :tensorflow :`period` argument is deprecated. Please use `save_freq` to specify the frequency in number of batches seen.
Train the model Now that we have everything setup, we will call model.fit to train the model for 135 epochs.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
tf.config.experimental_run_functions_eagerly(True)
model.fit_generator(generator = train_batch_generator,
steps_per_epoch = len(train_batch_generator),
epochs = 50,
verbose = 1,
callbacks = [early_stop, checkpoint],
max_queue_size = 3)
Epoch 1 /50
1071 /1071 [==============================] - ETA: 0s - loss: 0.0836
.
.
.
Epoch 00011: loss did not improve from 0.04997
1071 /1071 [==============================] - 287s 268ms/step - loss: 0.0612
Epoch 00011: early stopping
<tensorflow.python.keras.callbacks.History at 0x7f0494d50940 >
Evaluation Now, that we have trained our model, lets use it to predict the class labels and bounding boxes for a few images.
Lets pass an image and see the prediction for the image.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
imageReader = ImageReader(IMAGE_H,IMAGE_W=IMAGE_W, norm=lambda image : image / 255.)
out = imageReader.fit(train_image_folder + "/2007_005430.jpg")
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
print(out.shape)
X_test = np.expand_dims(out,0)
print(X_test.shape)
# handle the hack input
dummy_array = np.zeros((1,1,1,1,TRUE_BOX_BUFFER,4))
y_pred = model.predict([X_test,dummy_array])
print(y_pred.shape)
(416, 416 , 3 )
(1, 416 , 416 , 3 )
(1, 13 , 13 , 4 , 25 )
Note, that the y_pred needs to be scaled up. So we define a class called OutputRescaler for it.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
class OutputRescaler(object):
def __init__(self,ANCHORS):
self.ANCHORS = ANCHORS
def _sigmoid(self, x):
return 1. / (1. + np.exp(-x))
def _softmax(self, x, axis=-1, t=-100.):
x = x - np.max(x)
if np.min(x) < t:
x = x/np.min(x)*t
e_x = np.exp(x)
return e_x / e_x.sum(axis, keepdims=True)
def get_shifting_matrix(self,netout):
GRID_H, GRID_W, BOX = netout.shape[:3]
no = netout[...,0]
ANCHORSw = self.ANCHORS[::2]
ANCHORSh = self.ANCHORS[1::2]
mat_GRID_W = np.zeros_like(no)
for igrid_w in range(GRID_W):
mat_GRID_W[:,igrid_w,:] = igrid_w
mat_GRID_H = np.zeros_like(no)
for igrid_h in range(GRID_H):
mat_GRID_H[igrid_h,:,:] = igrid_h
mat_ANCHOR_W = np.zeros_like(no)
for ianchor in range(BOX):
mat_ANCHOR_W[:,:,ianchor] = ANCHORSw[ianchor]
mat_ANCHOR_H = np.zeros_like(no)
for ianchor in range(BOX):
mat_ANCHOR_H[:,:,ianchor] = ANCHORSh[ianchor]
return(mat_GRID_W,mat_GRID_H,mat_ANCHOR_W,mat_ANCHOR_H)
def fit(self, netout):
'''
netout : np.array of shape (N grid h, N grid w, N anchor, 4 + 1 + N class)
a single image output of model.predict()
'''
GRID_H, GRID_W, BOX = netout.shape[:3]
(mat_GRID_W,
mat_GRID_H,
mat_ANCHOR_W,
mat_ANCHOR_H) = self.get_shifting_matrix(netout)
# bounding box parameters
netout[..., 0] = (self._sigmoid(netout[..., 0]) + mat_GRID_W)/GRID_W # x unit: range between 0 and 1
netout[..., 1] = (self._sigmoid(netout[..., 1]) + mat_GRID_H)/GRID_H # y unit: range between 0 and 1
netout[..., 2] = (np.exp(netout[..., 2]) * mat_ANCHOR_W)/GRID_W # width unit: range between 0 and 1
netout[..., 3] = (np.exp(netout[..., 3]) * mat_ANCHOR_H)/GRID_H # height unit: range between 0 and 1
# rescale the confidence to range 0 and 1
netout[..., 4] = self._sigmoid(netout[..., 4])
expand_conf = np.expand_dims(netout[...,4],-1) # (N grid h , N grid w, N anchor , 1)
# rescale the class probability to range between 0 and 1
# Pr(object class = k) = Pr(object exists) * Pr(object class = k |object exists)
# = Conf * P^c
netout[..., 5:] = expand_conf * self._softmax(netout[..., 5:])
# ignore the class probability if it is less than obj_threshold
return(netout)
Let’s try out the OutputRescaler class.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
netout = y_pred[0]
outputRescaler = OutputRescaler(ANCHORS=ANCHORS)
netout_scale = outputRescaler.fit(netout)
Also, lets define a method to find bounding boxes with high confidence probability.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
def find_high_class_probability_bbox(netout_scale, obj_threshold):
'''
== Input ==
netout : y_pred[i] np.array of shape (GRID_H, GRID_W, BOX, 4 + 1 + N class)
x, w must be a unit of image width
y, h must be a unit of image height
c must be in between 0 and 1
p^c must be in between 0 and 1
== Output ==
boxes : list containing bounding box with Pr(object is in class C) > 0 for at least in one class C
'''
GRID_H, GRID_W, BOX = netout_scale.shape[:3]
boxes = []
for row in range(GRID_H):
for col in range(GRID_W):
for b in range(BOX):
# from 4th element onwards are confidence and class classes
classes = netout_scale[row,col,b,5:]
if np.sum(classes) > 0:
# first 4 elements are x, y, w, and h
x, y, w, h = netout_scale[row,col,b,:4]
confidence = netout_scale[row,col,b,4]
box = BoundBox(x-w/2, y-h/2, x+w/2, y+h/2, confidence, classes)
if box.get_score() > obj_threshold:
boxes.append(box)
return(boxes)
Let’s try out the above function and see if it works.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
obj_threshold = 0.015
boxes_tiny_threshold = find_high_class_probability_bbox(netout_scale,obj_threshold)
print("obj_threshold={}".format(obj_threshold))
print("In total, YOLO can produce GRID_H * GRID_W * BOX = {} bounding boxes ".format( GRID_H * GRID_W * BOX))
print("I found {} bounding boxes with top class probability > {}".format(len(boxes_tiny_threshold),obj_threshold))
obj_threshold = 0.03
boxes = find_high_class_probability_bbox(netout_scale,obj_threshold)
print("\nobj_threshold={}".format(obj_threshold))
print("In total, YOLO can produce GRID_H * GRID_W * BOX = {} bounding boxes ".format( GRID_H * GRID_W * BOX))
print("I found {} bounding boxes with top class probability > {}".format(len(boxes),obj_threshold))
obj_threshold =0.015
In total, YOLO can produce GRID_H * GRID_W * BOX = 676 bounding boxes
I found 20 bounding boxes with top class probability > 0.015
obj_threshold =0.03
In total, YOLO can produce GRID_H * GRID_W * BOX = 676 bounding boxes
I found 12 bounding boxes with top class probability > 0.03
Also, next we define a function to draw bounding boxes on the image.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
import cv2, copy
import seaborn as sns
def draw_boxes(image, boxes, labels, obj_baseline=0.05,verbose=False):
'''
image : np.array of shape (N height, N width, 3)
'''
def adjust_minmax(c,_max):
if c < 0:
c = 0
if c > _max:
c = _max
return c
image = copy.deepcopy(image)
image_h, image_w, _ = image.shape
score_rescaled = np.array([box.get_score() for box in boxes])
score_rescaled /= obj_baseline
colors = sns.color_palette("husl", 8)
for sr, box,color in zip(score_rescaled,boxes, colors):
xmin = adjust_minmax(int(box.xmin*image_w),image_w)
ymin = adjust_minmax(int(box.ymin*image_h),image_h)
xmax = adjust_minmax(int(box.xmax*image_w),image_w)
ymax = adjust_minmax(int(box.ymax*image_h),image_h)
text = "{:10} {:4.3f}".format(labels[box.label], box.get_score())
if verbose:
print("{} xmin={:4.0f},ymin={:4.0f},xmax={:4.0f},ymax={:4.0f}".format(text,xmin,ymin,xmax,ymax,text))
cv2.rectangle(image,
pt1=(xmin,ymin),
pt2=(xmax,ymax),
color=color,
thickness=sr)
cv2.putText(img = image,
text = text,
org = (xmin+ 13, ymin + 13),
fontFace = cv2.FONT_HERSHEY_SIMPLEX,
fontScale = 1e-3 * image_h,
color = (1, 0, 1),
thickness = 1)
return image
print("Plot with low object threshold")
ima = draw_boxes(X_test[0],boxes_tiny_threshold,LABELS,verbose=True)
figsize = (15,15)
plt.figure(figsize=figsize)
plt.imshow(ima);
plt.title("Plot with low object threshold")
plt.show()
print("Plot with high object threshold")
ima = draw_boxes(X_test[0],boxes,LABELS,verbose=True)
figsize = (15,15)
plt.figure(figsize=figsize)
plt.imshow(ima);
plt.title("Plot with high object threshold")
plt.show()
Plot with low object threshold
person 0.082 xmin= 183 ,ymin= 39 ,xmax= 292 ,ymax= 276
person 0.090 xmin= 181 ,ymin= 25 ,xmax= 291 ,ymax= 293
person 0.033 xmin= 180 ,ymin= 43 ,xmax= 251 ,ymax= 299
person 0.518 xmin= 186 ,ymin= 26 ,xmax= 286 ,ymax= 314
person 0.865 xmin= 178 ,ymin= 31 ,xmax= 291 ,ymax= 312
person 0.027 xmin= 179 ,ymin= 27 ,xmax= 344 ,ymax= 304
bicycle 0.017 xmin= 85 ,ymin= 180 ,xmax= 141 ,ymax= 237
bicycle 0.045 xmin= 62 ,ymin= 144 ,xmax= 174 ,ymax= 260
Plot with high object threshold
person 0.082 xmin= 183 ,ymin= 39 ,xmax= 292 ,ymax= 276
person 0.090 xmin= 181 ,ymin= 25 ,xmax= 291 ,ymax= 293
person 0.033 xmin= 180 ,ymin= 43 ,xmax= 251 ,ymax= 299
person 0.518 xmin= 186 ,ymin= 26 ,xmax= 286 ,ymax= 314
person 0.865 xmin= 178 ,ymin= 31 ,xmax= 291 ,ymax= 312
bicycle 0.045 xmin= 62 ,ymin= 144 ,xmax= 174 ,ymax= 260
bicycle 0.368 xmin= 76 ,ymin= 135 ,xmax= 219 ,ymax= 283
bicycle 0.315 xmin= 68 ,ymin= 132 ,xmax= 235 ,ymax= 289
Notice, that each object has multiple bounding boxes around it. So we define a function to apply non max suppression that chooes the bounding box with the highest IOU.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
def nonmax_suppression(boxes,iou_threshold,obj_threshold):
'''
boxes : list containing "good" BoundBox of a frame
[BoundBox(),BoundBox(),...]
'''
bestAnchorBoxFinder = BestAnchorBoxFinder([])
CLASS = len(boxes[0].classes)
index_boxes = []
# suppress non-maximal boxes
for c in range(CLASS):
# extract class probabilities of the c^th class from multiple bbox
class_probability_from_bbxs = [box.classes[c] for box in boxes]
#sorted_indices[i] contains the i^th largest class probabilities
sorted_indices = list(reversed(np.argsort( class_probability_from_bbxs)))
for i in range(len(sorted_indices)):
index_i = sorted_indices[i]
# if class probability is zero then ignore
if boxes[index_i].classes[c] == 0:
continue
else:
index_boxes.append(index_i)
for j in range(i+1, len(sorted_indices)):
index_j = sorted_indices[j]
# check if the selected i^th bounding box has high IOU with any of the remaining bbox
# if so, the remaining bbox' class probabilities are set to 0.
bbox_iou = bestAnchorBoxFinder.bbox_iou(boxes[index_i], boxes[index_j])
if bbox_iou >= iou_threshold:
classes = boxes[index_j].classes
classes[c] = 0
boxes[index_j].set_class(classes)
newboxes = [ boxes[i] for i in index_boxes if boxes[i].get_score() > obj_threshold ]
return newboxes
Lets use the above function to see if it reduces the number of bounding boxes.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
iou_threshold = 0.01
final_boxes = nonmax_suppression(boxes,iou_threshold=iou_threshold,obj_threshold=obj_threshold)
print("{} final number of boxes".format(len(final_boxes)))
2 final number of boxes
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
ima = draw_boxes(X_test[0],final_boxes,LABELS,verbose=True)
figsize = (15,15)
plt.figure(figsize=figsize)
plt.imshow(ima);
plt.show()
bicycle 0.368 xmin= 76 ,ymin= 135 ,xmax= 219 ,ymax= 283
person 0.865 xmin= 178 ,ymin= 31 ,xmax= 291 ,ymax= 312
Next, lets have some fun by evaluating more images and see the results.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
np.random.seed(1)
Nsample = 2
image_nms = list(np.random.choice(os.listdir(train_image_folder),Nsample))
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
outputRescaler = OutputRescaler(ANCHORS=ANCHORS)
imageReader = ImageReader(IMAGE_H,IMAGE_W=IMAGE_W, norm=lambda image : image / 255.)
X_test = []
for img_nm in image_nms:
_path = os.path.join(train_image_folder,img_nm)
out = imageReader.fit(_path)
X_test.append(out)
X_test = np.array(X_test)
## model
dummy_array = np.zeros((len(X_test),1,1,1,TRUE_BOX_BUFFER,4))
y_pred = model.predict([X_test,dummy_array])
for iframe in range(len(y_pred)):
netout = y_pred[iframe]
netout_scale = outputRescaler.fit(netout)
boxes = find_high_class_probability_bbox(netout_scale,obj_threshold)
if len(boxes) > 0:
final_boxes = nonmax_suppression(boxes,
iou_threshold=iou_threshold,
obj_threshold=obj_threshold)
ima = draw_boxes(X_test[iframe],final_boxes,LABELS,verbose=True)
plt.figure(figsize=figsize)
plt.imshow(ima);
plt.show()
bird 0.070 xmin= 249 ,ymin= 47 ,xmax= 416 ,ymax= 406
bird 0.070 xmin= 249 ,ymin= 47 ,xmax= 416 ,ymax= 406
bird 0.070 xmin= 249 ,ymin= 47 ,xmax= 416 ,ymax= 406
bottle 0.274 xmin= 250 ,ymin= 23 ,xmax= 416 ,ymax= 403
bird 0.070 xmin= 249 ,ymin= 47 ,xmax= 416 ,ymax= 406
chair 0.030 xmin= 265 ,ymin= 373 ,xmax= 394 ,ymax= 410
bottle 0.274 xmin= 250 ,ymin= 23 ,xmax= 416 ,ymax= 403
chair 0.030 xmin= 265 ,ymin= 373 ,xmax= 394 ,ymax= 410
chair 0.851 xmin= 272 ,ymin= 179 ,xmax= 416 ,ymax= 405
chair 0.312 xmin= 340 ,ymin= 3 ,xmax= 408 ,ymax= 49
chair 0.312 xmin= 340 ,ymin= 3 ,xmax= 408 ,ymax= 49
chair 0.851 xmin= 272 ,ymin= 179 ,xmax= 416 ,ymax= 405
chair 0.312 xmin= 340 ,ymin= 3 ,xmax= 408 ,ymax= 49
chair 0.312 xmin= 340 ,ymin= 3 ,xmax= 408 ,ymax= 49
chair 0.312 xmin= 340 ,ymin= 3 ,xmax= 408 ,ymax= 49
chair 0.312 xmin= 340 ,ymin= 3 ,xmax= 408 ,ymax= 49
Conclusion It was a good exercise to implement YOLO V2 from scratch and understand various nuances of writing a model from scratch. This implementation won’t achieve the same accuracy as what was described in the paper since we have skipped the pretraining step.